|
Пример реализации сверточной нейронной сетиКурс по нейронным сетям: https://stepik.org/a/227582?utm_source=proproprogs На предыдущих занятиях мы с вами подробно разобрали принцип работы сверточной нейронной сети и классы Conv2d, MaxPool2d, с помощью которых реализуются сверточные слои при работе с изображениями (двумерными пространственными сигналами). Пришло время применить эти знания, и сделаем это на примере определения координат центра солнечного диска на изображениях:
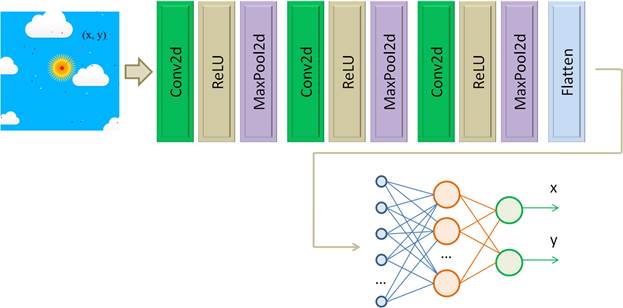
Для этого мы с вами сформируем сверточную НС следующей архитектуры:
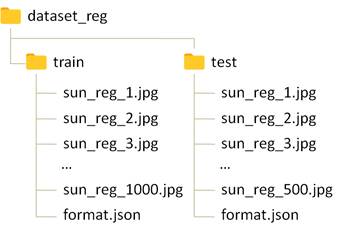
На вход будем подавать полноцветное изображение размером 256 x 256 пикселей в формате RGB (три цветовых канала). То есть, входной тензор будет иметь размерность: (batch, 3, 256, 256) Выходные значения карт признаков каждого сверточного слоя пропускаются через функцию активации ReLU, затем, выделяются только значимые величины с помощью слоя MaxPooling с непересекающимися окнами 2x2, то есть, линейные размеры карт признаков будут уменьшаться в два раза. И так реализуем три сверточных слоя. Последние выходные значения вытягиваются в вектор (по батчам) с помощью слоя Flatten. В результате на вход первого полносвязного слоя будет подаваться тензор размерностью: (batch, count_element) А на последнем слое будут формироваться вещественные значения координат (x, y) центра солнечного диска, присутствующего на изображении. Выборки изображений и класс SunDatasetДалее нам потребуются обучающая и тестовая выборки. Они сформированы заранее и представлены следующим образом:
В каждом каталоге имеется файл format.json со следующим содержимым: {
Здесь для каждого изображения указаны координаты центра солнца, которые являются целевыми значениями при обучении и тестировании НС. Эту обучающую выборку можно сгенерировать с помощью скрипта: https://github.com/selfedu-rus/neuro-pytorch/blob/main/dataset_gen_reg.zip Для работы с этой выборкой объявим класс SunDataset следующим образом: class SunDataset(data.Dataset): def __init__(self, path, train=True, transform=None): self.path = os.path.join(path, "train" if train else "test") self.transform = transform with open(os.path.join(self.path, "format.json"), "r") as fp: self.format = json.load(fp) self.length = len(self.format) self.files = tuple(self.format.keys()) self.targets = tuple(self.format.values()) def __getitem__(self, item): path_file = os.path.join(self.path, self.files[item]) img = Image.open(path_file).convert('RGB') if self.transform: img = self.transform(img) return img, torch.tensor(self.targets[item], dtype=torch.float32) def __len__(self): return self.length Здесь все должно быть вам уже знакомо и понятно. Далее создается объект этого класса вместе с классом DataLoader, например, следующим образом: transforms = tfs.Compose([tfs.ToImage(), tfs.ToDtype(torch.float32, scale=True)]) d_train = SunDataset("dataset_reg", transform=transforms) train_data = data.DataLoader(d_train, batch_size=32, shuffle=True) Все обучающая выборка готова к использованию. Реализация сверточной НССледующим шагом создадим модель НС и, так как все слои отрабатывают последовательно, то опишем ее с помощью класса Sequential: model = nn.Sequential( nn.Conv2d(3, 32, 3, padding='same'), nn.ReLU(), nn.MaxPool2d(2), nn.Conv2d(32, 8, 3, padding='same'), nn.ReLU(), nn.MaxPool2d(2), nn.Conv2d(8, 4, 3, padding='same'), nn.ReLU(), nn.MaxPool2d(2), nn.Flatten(), nn.Linear(4096, 128), nn.ReLU(), nn.Linear(128, 2) ) Первый сверточный слой на входе принимает трехканальное изображение, анализирует его 32 различными ядрами размером 3x3 каждое с добавлением нулевых отсчетов (padding='same') так, чтобы выходные карты признаков по размеру были равны входному сигналу, то есть, 256x256 элементов. Затем, полученные значения пропускаются через функцию активации ReLU и слой MaxPool2d с непересекающимися окнами 2x2. На выходе первого слоя MaxPool2d получаем тензор размерностью: (batch, 32, 128, 128) Этот тензор подается на следующие три таких же слоя. На выходе получаем тензор: (batch, 8, 64, 64) А на последней свертке – тензор: (batch, 4, 32, 32) Слой Flatten вытягивает последние три размерности в один вектор и получается тензор: (batch, 4096) В таком виде он поступает на первый полносвязный слой со 128 нейронами и функцией активации ReLU. Последний выходной полносвязный слой выдает два значения – координаты (x, y). У вас здесь может возникнуть вопрос, почему в этой сети именно три сверточных слоя? Почему именно такое количество фильтров в каждом из них? Почему первый полносвязный слой имеет 128 нейронов, а не какое-то другое? На все эти вопросы нет точного, четкого ответа. Как мы с вами уже говорили, структура НС определяется самим разработчиком, исходя из его опыта и поставленной задачи. Мне показалось, что можно попробовать именно такую. А вы, в качестве домашнего задания, попробуйте ее упростить с сохранением итогового результата (качества ее работы). Обучение сверточной нейронной сетиИтак, данные готовы, модель создана. Теперь можно приступать к ее обучению. Для этого воспользуемся оптимизатором Adam (наиболее часто применяемым при обучении НС) и среднеквадратичной функцией потерь (так как мы решаем задачу регрессии): optimizer = optim.Adam(params=model.parameters(), lr=0.001, weight_decay=0.001) loss_function = nn.MSELoss() Обратите внимание, что в оптимизаторе присутствует параметр weight_decay=0.001, который добавляет L2-регуляризацию для оптимизируемых параметров с целью снижения эффекта переобучения модели. Далее, зададим число эпох, переведем модель в режим обучения и запишем главный цикл обучения в следующем виде: epochs = 5 model.train() for _e in range(epochs): loss_mean = 0 lm_count = 0 train_tqdm = tqdm(train_data, leave=True) for x_train, y_train in train_tqdm: predict = model(x_train) loss = loss_function(predict, y_train) optimizer.zero_grad() loss.backward() optimizer.step() lm_count += 1 loss_mean = 1/lm_count * loss.item() + (1 - 1/lm_count) * loss_mean train_tqdm.set_description(f"Epoch [{_e+1}/{epochs}], loss_mean={loss_mean:.3f}") Я не стал здесь использовать выборку валидации, т.к., во-первых, всего 5 эпох и этого мало, чтобы делать какие-либо выводы по графикам, и, во-вторых, для ускорения процесса обучения. После обучения сохраним состояние сети, чтобы не обучать ее повторно: st = model.state_dict() torch.save(st, 'model_sun.tar') и выполним тестирование по отложенной выборке: d_test = SunDataset("dataset_reg", train=False, transform=transforms) test_data = data.DataLoader(d_test, batch_size=50, shuffle=False) # тестирование обученной НС Q = 0 count = 0 model.eval() test_tqdm = tqdm(test_data, leave=True) for x_test, y_test in test_tqdm: with torch.no_grad(): p = model(x_test) Q += loss_function(p, y_test).item() count += 1 Q /= count print(Q) После обучения и тестирования сети в консоли увидим следующие строчки: Epoch
[1/5], loss_mean=2705.431:
100%|██████████|
313/313 [03:54<00:00, 1.34it/s]
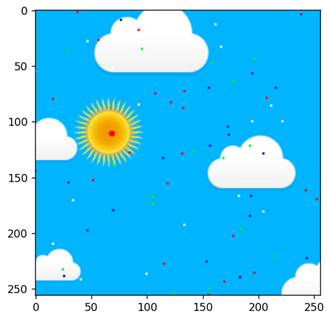
Получили средний квадрат ошибки, равный 9,46, что очень неплохо для такой сети. Кроме того, можно попробовать еще раз запустить обучение с другими начальными значениями весов, в надежде получить лучший результат. Проверка модели на изображенииНо значение среднего квадрата ошибки само по себе не особо понятно. Давайте попробуем взять нашу обученную модель и посмотреть визуально, какие координаты для изображений она будет выдавать. Для этого я написал следующую небольшую программу: neuro_net_29_view.py: https://github.com/selfedu-rus/neuro-pytorch После ее запуска для изображения с номером 100: num_img = 100 увидим результат:
Большая красная точка на солнечном диске и есть результат работы сверточной НС (координаты x, y). Как видите, в целом, она справляется с поставленной задачей. Курс по нейронным сетям: https://stepik.org/a/227582?utm_source=proproprogs Видео по теме |