|
Как нейронная сеть раскрашивает изображенияКурс по нейронным сетям: https://stepik.org/a/227582?utm_source=proproprogs На этом занятии вы узнаете, как с помощью СНС делается раскраска изображений (из градаций серого в цветное):
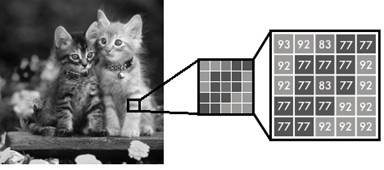
По-английски, это называется: Colorization Начнем с того, чем отличается на уровне пикселей цветное изображение от черно-белого (я градации серого для простоты буду называть черно-белым). Черно-белое представлено одной компонентой яркости со значениями пикселей в диапазоне от 0 до 255:
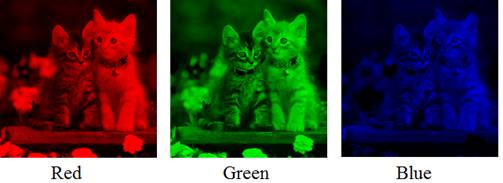
Полноцветные, как правило, описываются тремя компонентами RGB:
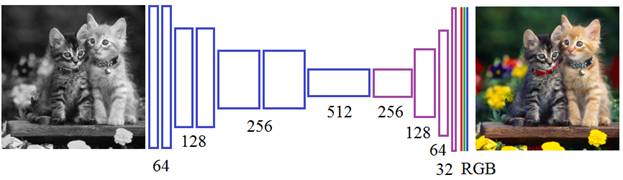
Следовательно, чтобы СНС раскрасила черно-белое изображение, на ее выходе должно формироваться три цветовых канала:
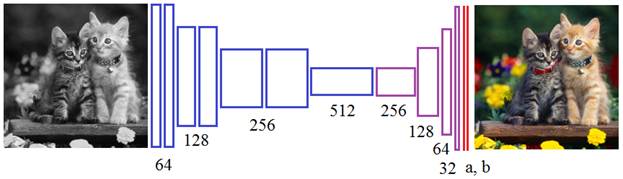
Но это не лучшее решение. Полноцветные изображения в данной задаче удобнее представлять в другом цветовом пространстве, например: Lab: (Light – слой яркости (градации серого); a, b – цветовые слои) Причем, пиксели слоя L меняются в диапазоне от 0 до 100, а пиксели слоев a и b – в диапазоне от -128 до 127. В этом случае СНС достаточно сгенерировать только для канала: a и b, вместо трех RGB (третий канал у нас уже есть – это исходное изображение в градациях серого):
Кроме того, 94% рецепторов человеческого глаза настроены на восприятие яркости (компоненты L – градации серого) и только 6% - на цветовые составляющие. Поэтому, если нейросеть немного «напутает» в цветах – это не так сильно скажется на визуальном восприятии картинки в целом. А вот путаница в яркостной составляющей – это уже критично. Но мы ее и не будем формировать, а возьмем уже готовую. Это еще одно преимущество цветового пространства Lab в рамках данной задачи. Для преобразования изображения из RGB в Lab в Python воспользуемся пакетом skimage и импортируем следующие методы: import numpy as np import matplotlib.pyplot as plt from skimage.color import rgb2lab, lab2rgb
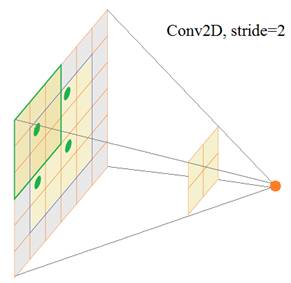
В качестве тестовой реализации мы можем взять любое полноцветное изображение, из него получить яркостную компоненту L (в градациях серого) и две цветовые компоненты a и b. На вход сети подадим изображение в градациях серого, а на выходе потребуем цветовые составляющие a и b: Для загрузки изображения в коллаборатории google импортируем следующие модули: from google.colab import files from io import BytesIO from PIL import Image И, затем, выполним строчки: upl = files.upload() names = list(upl.keys()) img = Image.open(BytesIO(upl[names[0]])) Загруженное изображение будет в RGB-формате. Для преобразования в пространство Lab определим следующую функцию: def processed_image(img): image = img.resize( (256, 256), Image.BILINEAR) image = np.array(image, dtype=float) size = image.shape lab = rgb2lab(1.0/255*image) X, Y = lab[:,:,0], lab[:,:,1:] Y /= 128 # нормируем выходные значение в диапазон от -1 до 1 X = X.reshape(1, size[0], size[1], 1) Y = Y.reshape(1, size[0], size[1], 2) return X, Y, size Мы здесь сначала изменяем размер изображения до 256х256 пикселей и преобразовываем его в массив numpy. Затем, делаем преобразование в пространство Lab (обратите внимание, на вход функции нужно передавать изображение с компонентами RGB и вещественными значениями пикселей от 0 до 1, поэтому мы здесь добавляем нормирующий множитель 1/255). Далее, выделяем яркостную компоненту X и две цветовые в Y. Цвета будут использоваться как требуемые выходные значения НС, поэтому мы их нормируем до диапазона [-1; 1]. Затем, формируем нужный формат размерностей для входных и выходных данных НС. Вызовем эту функцию и получим следующий набор данных: X, Y, size = processed_image(img) Теперь у нас есть что подавать на сеть и что требовать на ее выходах. Поэтому дальше нам нужно построить модель СНС, представленной ранее на рисунке. С помощью Keras это можно сделать так: from keras.layers import Conv2D, UpSampling2D, InputLayer from keras.models import Sequential model = Sequential() model.add(InputLayer(input_shape=(None, None, 1))) model.add(Conv2D(64, (3, 3), activation='relu', padding='same')) model.add(Conv2D(64, (3, 3), activation='relu', padding='same', strides=2)) model.add(Conv2D(128, (3, 3), activation='relu', padding='same')) model.add(Conv2D(128, (3, 3), activation='relu', padding='same', strides=2)) model.add(Conv2D(256, (3, 3), activation='relu', padding='same')) model.add(Conv2D(256, (3, 3), activation='relu', padding='same', strides=2)) model.add(Conv2D(512, (3, 3), activation='relu', padding='same')) model.add(Conv2D(256, (3, 3), activation='relu', padding='same')) model.add(Conv2D(128, (3, 3), activation='relu', padding='same')) model.add(UpSampling2D((2, 2))) model.add(Conv2D(64, (3, 3), activation='relu', padding='same')) model.add(UpSampling2D((2, 2))) model.add(Conv2D(32, (3, 3), activation='relu', padding='same')) model.add(Conv2D(2, (3, 3), activation='tanh', padding='same')) model.add(UpSampling2D((2, 2))) Чтобы не изобретать велосипед, я взял эту модель из статьи, посвященной теме раскраски изображений с помощью глубоких нейронных сетей: https://github.com/baldassarreFe/deep-koalarization Обратите внимание на структуру слоев. Первый слой – это обычный сверточный слой, состоящий из 64 фильтров и ядрами 3х3 пиксела. Следующая свертка имеет те же параметры, но шаг смещения фильтров равен двум пикселям по каждой координате. Почему здесь масштабирование признаков делается с помощью увеличения шага, а не методом MaxPooling который использовался при классификации и стилизации изображений? Дело в том, что слой MaxPooling хорошо концентрирует значимую информацию об особенностях изображения, но несколько искажает взаимное расположение пикселей на плоскости. В задачах колоризации такое искажение представления изображения недопустимо. Поэтому и используется сверточный слой с шагом 2.
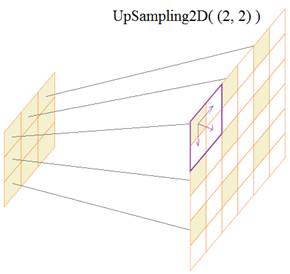
Так продолжается движение в глубину, пока не встретится слой UpSampling2D((2, 2)). Параметр (2, 2) задает увеличение размера каждого элемента карты признаков. В Keras это работает следующим образом:
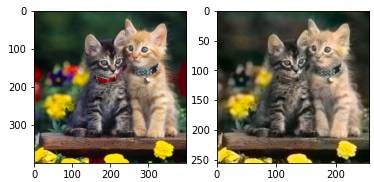
Каждый элемент карты признаков увеличивается до указанного размера (2, 2), причем при масштабировании каждой ячейки (синяя рамка) значение просто копируется в соседние, заполняя все свое пространство. И так каждый элемент. В результате получается увеличенное грубое представление карт признаков на каждом канале. На последнем выходном слое имеем два канала (для двух цветовых компонент a и b), размеры которых совпадают с размерами исходного (входного) изображения. В качестве функции активации выбираем гиперболический тангенс, чтобы цветовые составляющие имели диапазон [-1; 1]. Так сеть будет формировать цвета. Давайте для примера обучим эту НС на одном изображении, то есть, потребуем, чтобы она выдавала строго определенные выходные цветовые компоненты: model.compile(optimizer='adam', loss='mse') model.fit(x=X, y=Y, batch_size=1, epochs=50) Мы здесь делаем оптимизацию по Adam, критерий качества – минимум среднего квадрата рассогласования. На вход этой сети будем подавать черно-белое изображение, а на выходе требовать заданные для него цветовые составляющие. После обучения прогоним через сеть изображение в градациях серого: output = model.predict(X) и посмотрим на результат: output *= 128 min_vals, max_vals = -128, 127 ab = np.clip(output[0], min_vals, max_vals) cur = np.zeros((size[0], size[1], 3)) cur[:,:,0] = np.clip(X[0][:,:,0], 0, 100) cur[:,:,1:] = ab plt.subplot(1, 2, 1) plt.imshow(img) plt.subplot(1, 2, 2) plt.imshow(lab2rgb(cur))
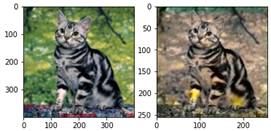
Как видите, это одно конкретное изображение она раскрасила вполне приемлемо, правда, мы именно на нем ее и обучали. Но этот простейший пример показывает, что такая операция, в принципе, возможна и общая идея вроде бы рабочая. Но если взять другое изображение, то эффект будет уже значительно хуже:
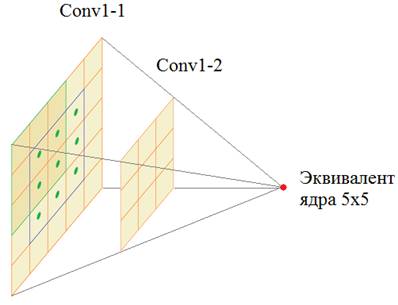
И это не удивительно. Наша обучающая выборка состояла всего из одного изображения. Этого явно недостаточно. Нужно хотя бы несколько тысяч. Будет ли такое обучение? В качестве домашнего задания сформируйте выборку из тысяч цветных изображений кошек (или собак, или пляжей и т.п. главное, чтобы класс изображений был каким-то одним, иначе это негативно скажется на результате). И посмотрите, как это будет работать. А мы зададимся вопросом: почему НС в принципе способна выполнять раскраску, как это работает? Давайте посмотрим еще раз на структуру НС. Здесь первые два слоя образуют свертки с ядром 3х3. Это приближенно заменяет свертку фильтра с ядром 5х5:
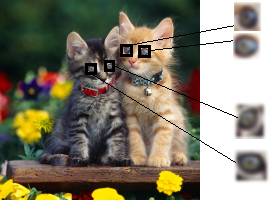
Получается, что каждый признак парных слоев связан с областью 5х5 отсчетов. И если в эту область часто попадают округлые очертания объекта темного объекта (например, глаза котов), то сеть связывает такой признак с темным цветом:
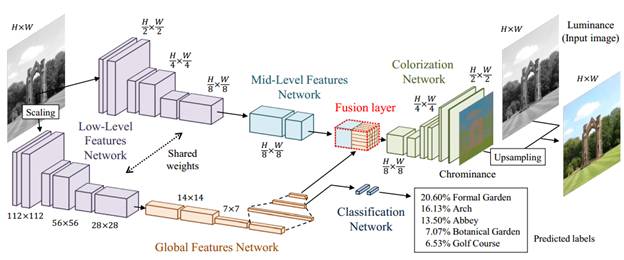
Это, особенно хорошо проявляется на глубоких слоях, где формируются более сложные объекты: глаза, лапы, цветок, трава и т.п. В весовых коэффициентах, как бы, сохраняется опыт и «знания» о соответствии элементов черно-белого изображения этим же элементам, но в цвете. Примерно так можно воспринимать работу НС по раскраске изображений. Как я уже отмечал, приведенный алгоритм колоризации изображений может неплохо работать на однотипных данных, например, котов на фоне природы, или лица людей, или фотографий морских пляжей и так далее. Но если все это смешать, то результаты станут заметно хуже. В 2016-м году ряд японских исследователей: Хатоши Иизука, Эдгар Симо-Серра и Хироши Ишикава http://hi.cs.waseda.ac.jp/~iizuka/projects/colorization/data/colorization_sig2016.pdf предложили интересную концепцию по улучшению раскраски изображений. Они к уже существующей НС параллельно добавили еще одну, которая выполняет обычную классификацию, то есть, определяет: к какому классу относится раскрашиваемое изображение. Как вы понимаете, если наша НС будет дополнительно «знать» о типе входных данных (изображение котов, пляжа, руин, лиц, машин и т.п.), то она сможет сохранить специализацию по раскраске и при этом работать с любыми данными.
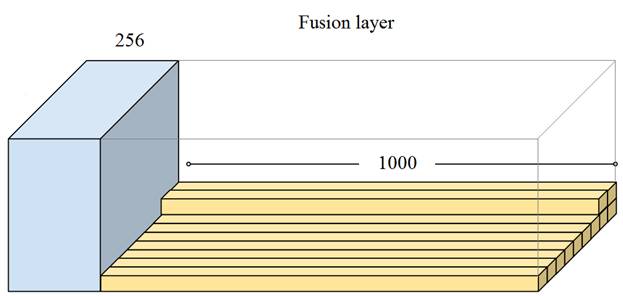
Для определения характера изображения ученые предложили воспользоваться одной из известных и уже обученных СНС, например, знакомой нам VGG19, которая на выходе дает 1000 различных классов. Или же, можно взять более продвинутую сеть Inception-ResNet-v2 которая также имеет 1000 выходных классов. На рисунке, который я взял из статьи, показано как добавляется классифицирующая сеть к раскрашивающей сети. Для этого японские ученые добавили еще один, так называемый слой слияния (Fusion layer). Что это за слой? В центре первой сверточной сети (с наименьшими размерами карт признаков) создается дополнительный сверточный слой с 256 каналами и таким же размером карт признаков, что и в предыдущем слое. Затем, признаки дополняются вектором классификации от второй СНС, по следующей схеме:
Благодаря этому, каждый признак в дальнейшем будет ассоциирован с установленной тематикой входного изображения и качество раскраски значительно увеличивается. ЗаключениеИтак, на последних занятиях мы с вами увидели несколько примеров использования сверточных НС для различных задач: классификации, стилизации, колоризации. В каждой из них СНС используется по своему, подчас неожиданно, как в задаче стилизации, где она применяется для вычисления критерия качества. Эти примеры показывают, что нейронные сети – всего лишь инструмент и как мы будем его использовать, зависит лишь от нашей фантазии. Курс по нейронным сетям: https://stepik.org/a/227582?utm_source=proproprogs Видео по теме |