|
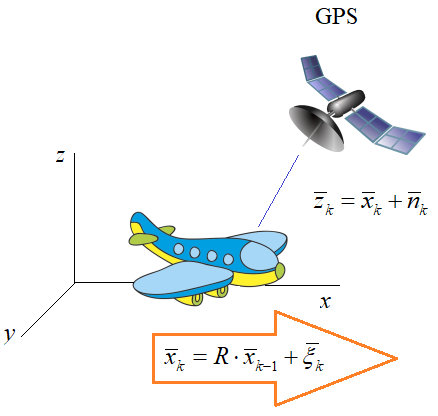
Векторный фильтр КалманаРеализация алгоритма на Python (lesson 7. kalman_vector_1.py) На предыдущем занятии мы увидели как можно применить фильтр Калмана для построения оценок координаты x при перемещении мальчика. Он выглядел так:
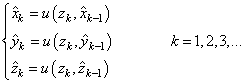
Но, если рассмотреть более общую задачу и попытаться построить оценки сразу по трем пространственным осям, то в самом простом случае можно выполнить три таких процедуры независимо по каждой оси:
Здесь
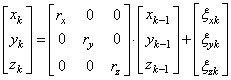
или, в таких очевидных обозначениях:
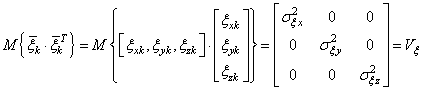
Здесь и далее будем полагать, что все случайные составляющие подчиняются нормальному закону распределения с нулевым средним и некоторыми дисперсиями. Например, для
Модель наблюдений, соответственно, определим вектором z:
или, в векторном виде:
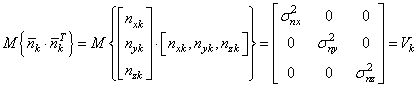
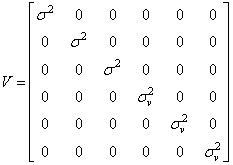
Здесь также дисперсии шумов, будут образовывать диагональную матрицу:
Таким образом, у нас есть векторная марковская модель изменения объекта в пространстве и вектор наблюдений текущего местоположения объекта:
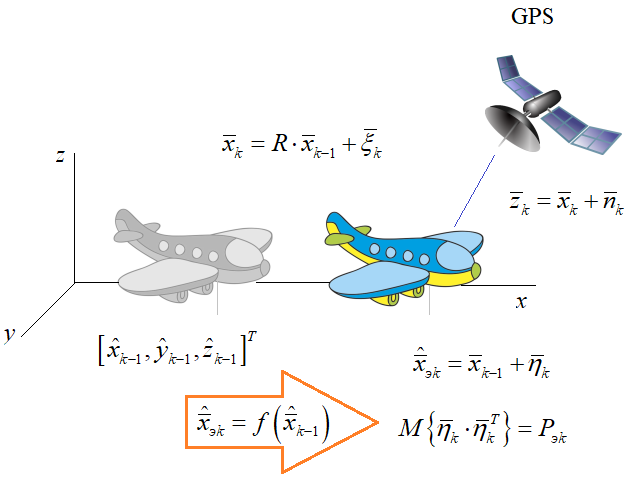
Когда на вход приемника приходит самое первое наблюдение, то лучшая оценка – это значение самого наблюдения:
с дисперсией ошибок оценивания:
В следующий момент времени самолет немного меняет свое местоположение и на вход GPS-приемника приходит очередное наблюдение:
Как в этой
ситуации нам построить оценку текущего местоположения? Одно наблюдение у нас
есть – это вектор
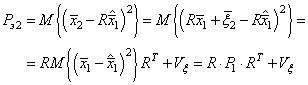
Я не буду здесь приводить доказательство оптимальности этого прогноза, вывод делается аналогично одномерному случаю, о котором мы говорили на предыдущем занятии. Теперь, нам нужно вычислить дисперсию ошибок прогноза, которая равна:
В результате, мы имеем все необходимые данные для построения оценок координат на текущем шаге с помощью векторного фильтра Калмана. Используя формулы скалярного фильтра:
Обобщим их для векторно-матричного случая:
Как видите, мы здесь лишь формально преобразовали скалярные выражения в векторные и получили возможность строить уже векторы оценок. Это очень удобно. В этом одно из достоинств векторов и матриц: они позволяют легко обобщать задачи на многомерный случай. Итак, на втором шаге, имеем следующие вычисления:
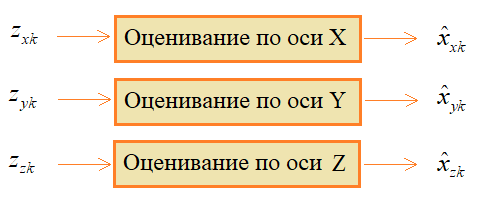
Ну а все последующие положения рекуррентно вычисляются по этим же самым формулам. Давайте реализуем векторный фильтр Калмана на Python и посмотрим на результаты его работы. Делаем Фактически, при условии некоррелированности шумов и независимости перемещений по каждой из координат, мы получили три независимых канала оценивания параметров x, y, z:
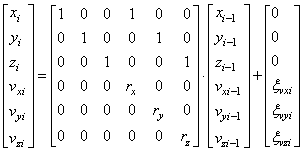
Однако, если модифицировать нашу модель и учесть в ней скорости движения объекта по каждой из координат:
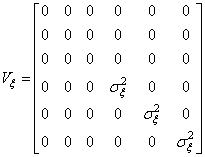
То у нас будет связь между наблюдениями скорости и соответствующей координаты. Причем, векторный фильтр Каламана автоматически наилучшим образом скомбинирует эти набюлдения для вычисления оптимальной выходной оценки в соответствии с описанной моделью перемещения. И это очень удобно. Нам не нужно решать систему линейных уравнений, находить оптимальные коэффициенты, все аккуратно расписывать. Все это делается автоматически при вычислении обратных матриц в фильтре Калмана. Далее, для нашего второго варианта матрицы дисперсий порождающего шума и шума наблюдений, будут выглядеть так:
А весь остальной алгоритм оценивания будет прежним:
Мало того, если шумы в наблюдениях коррелированны между собой, то это приведет лишь к изменению начальной записи этих матриц, реализация фильтра Калмана на уровне векторов и матриц останется прежней. Вот так можно описать и реализовать общий алгоритм оценивания, для разных моделей движения объектов и шумов в наблюдениях.
Видео по теме |