|
Марковские процессы в дискретном времениРеализации алгоритмов на Python (файлы lesson 4. markov_1.py и lesson 4. markov_2.py) На этом занятии мы с вами познакомимся с одной довольно распространенной на практике моделью, известной под названиями: марковская последовательность, марковский процесс и т.п. Они были названы в честь русского математика Маркова Андрей Андреевича, который в 1907 году положил начало изучению таких моделей. Давайте посмотрим, чем они так хороши и где применяются.
Из теории вероятностей хорошо известно, что произвольную случайную дискретную последовательность, длиной N отсчетов:
можно в общем виде вероятностно описать с помощью многомерной ПРВ:
Однако, на практике использовать такую формулу очень неудобно, так как она приводит к резкому увеличению сложности алгоритмов при увеличении числа отсчетов N. Как можно было бы ее упростить? Самое простое – это все условные ПРВ заменить безусловными:
Но для каких сигналов корректно применить такую ПРВ? Да, для тех, у которых все отсчеты являются независимыми между собой. Обычно, он соответствует шуму, а не полезному сигналу.
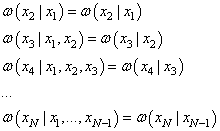
Как же нам описать полезный сигнал, у которого отсчеты зависимы между собой и при этом не усложнять его вероятностное описание? Для этого нужно сделать следующий шаг в усложнении модели и все условные ПРВ сделать зависимыми только от предыдущего момента времени:
И, тогда многомерная ПРВ может быть записана в довольно компактном и простом виде:
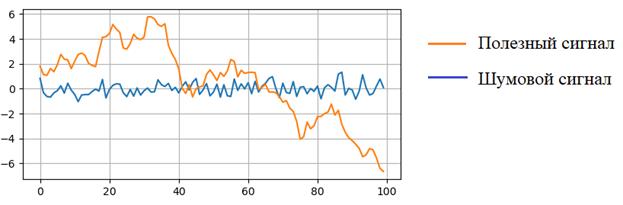
Случайные последовательности, удовлетворяющие такой ПРВ, получили название марковские последовательности. Но что это за сигналы, которые она описывает? В самом простом варианте, можно взять такую модель:
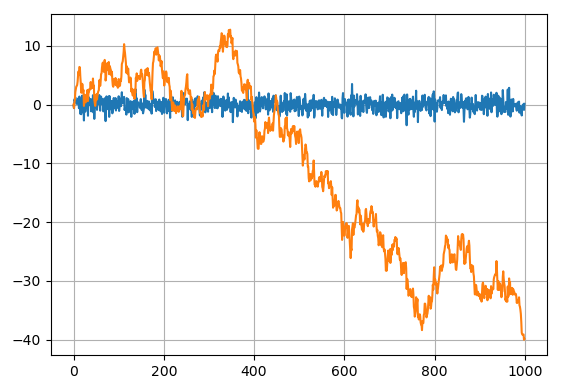
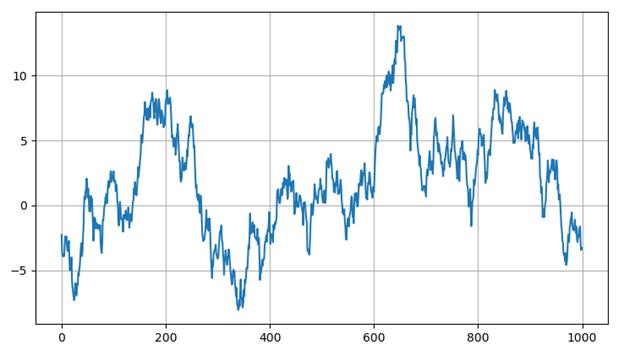
Здесь Реализация на Pythonimport numpy as np import matplotlib.pyplot as plt N = 1000 sigma = 1 fSignal = np.zeros(N) fNoise = np.random.normal(0, sigma, N) for i in range(1, N): fSignal[i] = fSignal[i-1] + fNoise[i] plt.plot(fNoise) plt.plot(fSignal) plt.grid(True) plt.show()
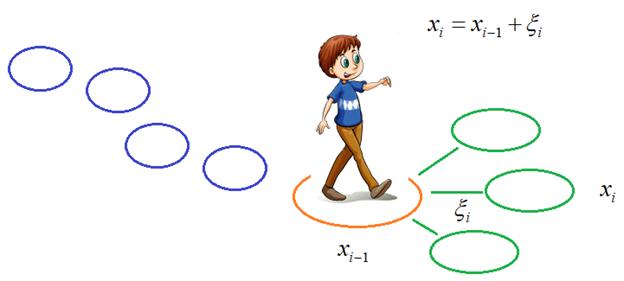
Здесь синий график – это шум, на основе которого была построена простейшая марковская последовательность. Хорошо, визуально мы видим, как он отличается от обычного шумового сигнала, но что он может описывать в реальной жизни? В действительности, очень важный процесс – перемещение объекта в пространстве, например, человека, машины, самолета, корабля и т.д. В частности,
посмотрим на перемещение идущего мальчика. Наша задача спрогнозировать его
положение по оси X в следующий момент времени. Очевидно, для этого не
нужно знать, где он был пять минут назад, достаточно знания его текущего
местоположения (ну, может быть, еще скоростей движения по координатам X и Y и ускорений, но
для простоты мы сейчас это не берем в расчет). В следующий момент времени,
допустим, через секунду, он неизбежно будет где-то поблизости. И это где-то,
как раз и описывается случайной добавкой
Причем, для
этого конкретного случая, когда случайная добавка
Следовательно, модель полностью определена и может быть использована для построения различных алгоритмов, например, навигации или управления. Аналогично будет и для любого другого движущегося в пространстве объекта. Но у этой конкретной модели есть один недостаток: дисперсия случайного процесса будет возрастать с ростом числа наблюдений, так как любое текущее положение – это сумма случайных добавок:
соответственно, дисперсия (с учетом нулевого МО):
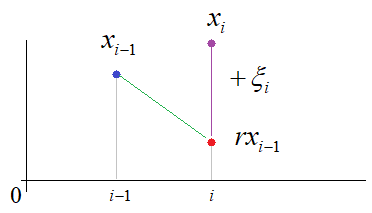
Авторегрессия 1-го порядкаКонечно, для описания координат x и y это вполне нормально, но, например, для описания изменения скорости или ускорения – уже не подходит. Но мы можем ее легко модифицировать и адаптировать под свои нужды, например, вот так:
Мы здесь
выбираем коэффициент
уменьшается в
Такая модель получила название авторегрессии 1-го порядка. И выглядит следующим образом: import numpy as np import matplotlib.pyplot as plt N = 1000 sigma = 5 r = 0.99 en = np.sqrt((1-r*r)*sigma*sigma) fSignal = np.zeros(N) fSignal[0] = np.random.normal(0, sigma) for i in range(1, N): fSignal[i] = r*fSignal[i-1] + np.random.normal(0, en) plt.plot(fSignal) plt.grid(True) plt.show()
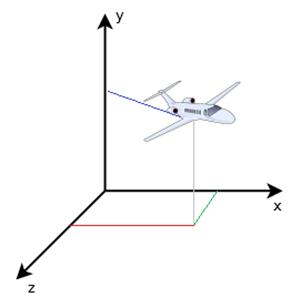
Векторные марковские последовательностиВернемся к задаче построения модели положения движущегося в пространстве объекта.
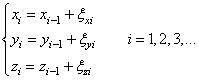
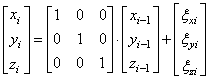
Здесь мы имеем три пространственные координаты. И для каждой из координат можно записать модель:
Однако, оперировать на практике такой системой не очень удобно. Гораздо лучше все представить в векторно-матричной форме:
или, в следующих обозначениях:
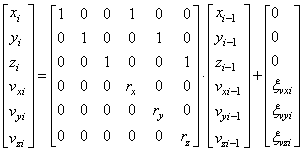
В результате, мы получаем удобную и компактную векторно-матричную модель марковской последовательности. Причем, ее общий вид останется без изменений, если, например, добавить в нее скорости по каждой из координат:
то получим следующий алгоритм изменения координат:
и так для каждой
координаты. Это более точное описание движения, так как здесь учитываются еще и
скорости. То есть, подбирая случайные добавки Видео по теме |