|
Фильтр Калмана для авторегрессионого уравненияНа предыдущем
занятии мы с вами рассмотрели общий принцип работы фильтра Калмана и получили
следующие рекуррентные выражения для построения оценки параметра x – координаты
стоящего человека, по наблюдениям
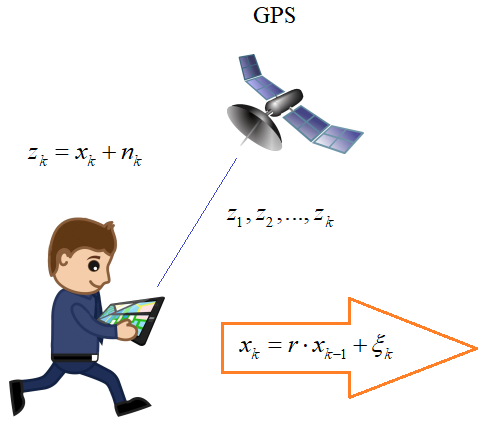
Давайте теперь сделаем следующий шаг и положим, что измерения координаты происходят во время движения:
Причем, модель изменения положения идущего мальчика вдоль оси X будет определяться марковской последовательностью:
Здесь Далее, на вход GPS-приемника поступают наблюдения в дискретные моменты времени (допустим, каждую секунду) в формате:
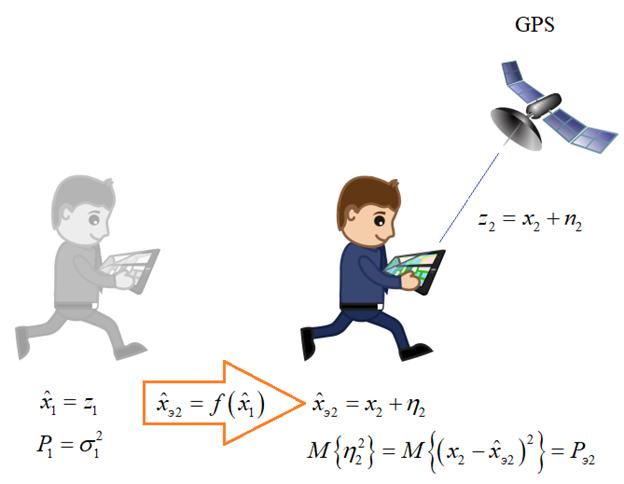
Здесь Для этого, конечно же, воспользуемся фильтром Калмана. При поступлении первого наблюдения оценка будет равна:
Затем, мальчик немного переместился и на вход GPS-приемника поступило следующее наблюдение:
Как нам теперь
правильно применить фильтр Калмана, чтобы использовать ранее полученную оценку
Тогда этот прогноз можно воспринимать как второе наблюдение:
с дисперсией ошибки этого прогноза:
И далее уже по фильтру Калмана «взвесить» эти два наблюдения и получить оценку текущего местоположения. Здесь возникает задача построения прогноза. Для этого мы воспользуемся нашей моделью перемещения мальчика:
в соответствии с которой значение
Затем, учитывая, что все шумы и СВ в моделях подчиняются нормальному закону, то лучший прогноз может быть построен по правилу:
где α – некоторый неизвестный весовой коэффициент. И, как вы уже догадались, найти этот коэффициент можно из условия минимума дисперсии ошибки прогнозирования:
Из уравнения:
легко найти, что
и лучший прогноз есть:
с дисперсией ошибки прогнозирования:
Все, теперь у
нас есть вся информация для вычисления оценки
где ошибка оценивания второго отсчета координаты X, равна:
По аналогии вычисляются оценки для любого k-го отсчета. Сначала вычисляем прогноз и дисперсию ошибки прогнозирования:
Затем, вычисляем дисперсию ошибки оценивания k-го отсчета:
и, наконец, саму оценку:
Фактически, мы получили алгоритм фильтрации авторегрессионной последовательности 1-го порядка с помощью фильтра Калмана в условиях гауссовского независимого шума. Важным фактом здесь является построение оптимальных оценок. То есть, никакой другой алгоритм не даст лучших результатов при таких условиях. Что это за условия: 1. Мы работаем с гауссовскими распределениями (сигнал x и шумы в наблюдениях z подчиняются нормальным распределениям). 2. Модель
перемещения – марковская. Это значит, что оценка, полученная на предыдущем шаге
При других условиях, возможно, этот алгоритм придется корректировать, чтобы он давал оптимальные оценки. Если, это конечно возможно. Нередко бывают ситуации, когда реализовать на практике оптимальный алгоритм невозможно. Реализация на PythonРеализация алгоритма на Python (lesson 6. filter kalman.py) Давайте теперь посмотрим на результаты построения оценок рассмотренным алгоритмом. Реализуем на Python фильтр Калмана для решения описанной задачи: import numpy as np import matplotlib.pyplot as plt N = 100 # число наблюдений dNoise = 1 # дисперсия шума dSignal = 5 # дисперсия сигнала r = 0.99 # коэффициент корреляции в модели движения en = 0.1 # дисперсия СВ в модели движения x = np.zeros(N) # истинные координаты перемещения (пока просто нули) x[0] = np.random.normal(0, dSignal) # формирование первой координаты for i in range(1, N): # формирование последующих координат по модели АР x[i] = r*x[i-1] + np.random.normal(0, en) z = x + np.random.normal(0, dNoise, N) # формирование наблюдений # фильтрация сигнала с помощью фильтра Калмана xx = np.zeros(N) # вектор для хранения оценок перемещений P = np.zeros(N) # вектор для хранения дисперсий ошибок оценивания xx[0] = z[0] # первая оценка P[0] = dNoise # дисперсия первой оценки # рекуррентное вычисление оценок по фильтру Калмана for i in range(1, N): Pe = r*r*P[i-1]+en*en P[i] = (Pe*dNoise)/(Pe+dNoise) xx[i] = r*xx[i-1]+P[i]/dNoise*(z[i]-r*xx[i-1]) # отображение результатов fig, (ax1, ax2) = plt.subplots(nrows=2, ncols=1, figsize=(10, 5)) ax1.plot(x) ax1.plot(z) ax1.plot(xx) ax1.grid(True) ax2.plot(P) ax2.grid(True) plt.show() Видео по теме |