|
Описание методов вне классаПрактический курс по ООП C++: https://stepik.org/a/205781?utm_source=proproprogs Классы часто имеют тенденцию разрастаться по мере написания программы. Например, класс PointND на предыдущих занятиях приобретал такой вид: class PointND { unsigned total{ 0 }; int* coords{ nullptr }; public: PointND() : total(0), coords(nullptr) { } PointND(unsigned sz) : total(sz) { coords = new int[total] {0}; } PointND(int* cr, unsigned len) : PointND(len) { set_coords(cr, len); } PointND(const PointND& other) : PointND(other.coords, other.total) { } const PointND& operator=(const PointND& other) { delete[] coords; total = other.total; coords = new int[total]; set_coords(other.coords, total); return *this; } unsigned get_total() { return total; } const int* get_coords() { return coords; } void set_coords(int* cr, unsigned len) { for (unsigned i = 0; i < total; ++i) coords[i] = (i < len) ? cr[i] : 0; } ~PointND() { delete[] coords; } }; И это еще относительно небольшой класс. Если он и дальше продолжит увеличиваться, то программисту станет сложно в нем ориентироваться: искать нужные методы, вносить правки и т.п. Но как можно упростить это описание? Если мы вспомним с вами о прототипах функций, которые рассматривали в базовом курсе языка Си, то аналогичный подход можно было бы применить и при объявлении класса. Давайте посмотрим, как это делается. Вначале мы опишем класс, который будет содержать объявления переменных, прототипы методов и методы с очень короткими реализациями: class PointND { unsigned total{ 0 }; int* coords{ nullptr }; public: PointND() : total(0), coords(nullptr) { } PointND(unsigned sz) : total(sz) { coords = new int[total] {0}; } PointND(int* cr, unsigned len) : PointND(len) { set_coords(cr, len); } PointND(const PointND& other) : PointND(other.coords, other.total) { } const PointND& operator=(const PointND& other); ~PointND() { delete[] coords; } unsigned get_total() { return total; } const int* get_coords() { return coords; } void set_coords(int* cr, unsigned len); }; Смотрите, здесь методы с большим количеством операторов представлены прототипами, остальные остались как есть непосредственно в классе. В результате текст программы стал гораздо понятнее и весь список методов буквально перед глазами программиста. Ориентироваться в таком классе куда проще. Но где и как нам определить тела (реализации) для прототипов методов? Очевидно, это делается вне класса. Как мы с вами уже говорили, класс формирует свою область видимости и для доступа к ней нужно прописать имя класса и воспользоваться символом четверототия (раскрытия области видимости): [тип данных] <имя класса>::<элемент класса> Первый прототип у нас – это оператор присваивания. За пределами класса к его описанию (прототипу) можно обратиться следующим образом: const PointND& PointND::operator=(const PointND& other) { delete[] coords; total = other.total; coords = new int[total]; set_coords(other.coords, total); return *this; } Обратите внимание, что сначала указывается возвращаемый тип, затем, обращение к прототипу оператора в области видимости класса PointND и только потом – тело метода. Таким образом, мы вынесли за пределы класса реализацию метода оператора присваивания. По аналогии и со вторым прототипом set_coords: void PointND::set_coords(int* cr, unsigned len) { for (unsigned i = 0; i < total; ++i) coords[i] = (i < len) ? cr[i] : 0; } В результате, мы получили точно такой же класс PointND, но с разнесенным его общим описанием и реализацией некоторых методов за пределами класса. Работать он будет абсолютно так же, как и прежде. Обратите внимание, что формировать такое раздельное описание можно не только публичных методов, но вообще любых, например, приватных. Если метод set_coords в классе PointND поместить в секцию private: class PointND { ... private: void set_coords(int* cr, unsigned len); }; То никаких проблем с определением тела этого прототипа за пределами класса не будет, так как компилятор «понимает», что здесь прописывается реализация метода, а не его вызов. А вот просто обратиться к приватному атрибуту set_coords уже не получится: int main() { PointND pt(5); PointND::set_coords; // ошибка PointND::get_coords; // ok return 0; } Тогда, как с публичным атрибутом get_coords таких проблем не возникает. То есть, нужно различать описание метода и его вызов. Для компилятора – это принципиально разные вещи. Многомодульные программыКонечно, в реальных проектах объявления классов, как правило, делается в отдельных заголовочных файлах, а затем по мере необходимости, подключаются к файлам реализации.
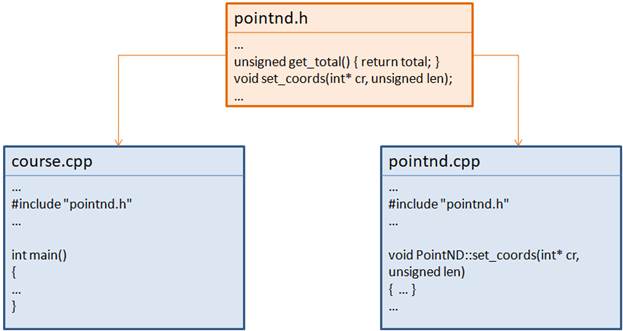
В нашем примере было бы логично вынести объявление класса PointND в отдельный файл с таким же именем pointnd.h, а затем, подключить его к двум cpp-файлам:
Содержимое файла pointnd.h можно определить следующим образом: #ifndef _POINTND_H_ #define _POINTND_H_ class PointND { unsigned total{ 0 }; int* coords{ nullptr }; public: PointND() : total(0), coords(nullptr) { } PointND(unsigned sz) : total(sz) { coords = new int[total] {0}; } PointND(int* cr, unsigned len) : PointND(len) { set_coords(cr, len); } PointND(const PointND& other) : PointND(other.coords, other.total) { } const PointND& operator=(const PointND& other); ~PointND() { delete[] coords; } unsigned get_total() { return total; } const int* get_coords() { return coords; } void set_coords(int* cr, unsigned len); }; #endif Обратите внимание на директивы условной компиляции. Они часто применяются в заголовочных файлах для защиты от повторного включения заголовка к одному и тому же cpp-файлу. Подробно мы с вами об этом говорили в базовом курсе языка Си. Файл course.cpp определим как: #include <iostream> #include "pointnd.h" int main() { int c[] = {1, 2, 3}; PointND pt(c, 3); return 0; } А файл pointnd.cpp будет содержать реализации: #include "pointnd.h" const PointND& PointND::operator=(const PointND& other) { delete[] coords; total = other.total; coords = new int[total]; set_coords(other.coords, total); return *this; } void PointND::set_coords(int* cr, unsigned len) { for (unsigned i = 0; i < total; ++i) coords[i] = (i < len) ? cr[i] : 0; } Все, у нас с вами получилась программа, состоящая из двух модулей и одного заголовочного файла pointnd.h. Но, давайте, детальнее посмотрим, как будет подключаться класс в каждый из этих модулей. В классе PointND есть определение методов вместе с их реализациями. Так как тела методов достаточно просты, то часто компилятор превращает их в inline-методы, то есть, они не вызываются подобно функциям, а их реализации буквально вставляются в места их вызова. Но, если какой-либо метод компилятор воспринимает на уровне обычной функции и реализация этого метода прописана в классе, то тело такого метода будет продублировано в каждом модуле программы, где есть подключение заголовка с этим классом. Конечно, это приведет к увеличению размера самой программы, хотя других последствий быть не должно. Программа в целом будет работать корректно. Поэтому большие реализации все же лучше выносить за пределы класса и объявлять их в отдельном модуле. В нашем примере – это модуль pointnd.cpp. Практический курс по ООП C++: https://stepik.org/a/205781?utm_source=proproprogs Видео по теме |